[23]:
# Remove input cells at runtime (nbsphinx)
import IPython.core.display as d
d.display_html('<script>jQuery(function() {if (jQuery("body.notebook_app").length == 0) { jQuery(".input_area").toggle(); jQuery(".prompt").toggle();}});</script>', raw=True)
Direction Look-Up-Tables (LUTs)¶
Datasample: gamma-1 (goes into energy training)
Data level: DL1b (telescope-wise image parameters)
Scope:
Approach:
calculate for each image the miss parameter, aka the distance from the image axis to the point on the camera which corresponds to the true gamma-ray direction
build a LUT per telescope type, containing in bins of image intensity and width/length, the square of <miss>.
Table of contents¶
[24]:
from pathlib import Path
import numpy as np
from scipy.stats import binned_statistic_2d
import pandas
import tables
import uproot
import matplotlib.pyplot as plt
from matplotlib.colors import LogNorm
from ctapipe.image import camera_to_shower_coordinates
[25]:
def get_camera_names(inputPath = None, fileName = None):
"""Read the names of the cameras.
Parameters
==========
infile : str
Full path of the input DL1 file.
fileName : str
Name of the input DL1 file.
Returns
=======
camera_names : list(str)
Table names as a list.
"""
if (inputPath is None) or (fileName is None):
print("ERROR: check input")
h5file = tables.open_file(inputPath / fileName, mode='r')
group = h5file.get_node("/")
camera_names = [x.name for x in group._f_list_nodes()]
h5file.close()
return camera_names
[26]:
def load_reset_infile_protopipe(inputPath = None, fileName = None, camera_names=None, cols=None):
"""(Re)load the file containing DL1(a) data and extract the data per telescope type.
Parameters
==========
infile : str
Full path of the input DL1 file.
fileName : str
Name of the input DL1 file.
Returns
=======
dataFrames : dict(pandas.DataFrame)
Dictionary of tables per camera.
"""
if (inputPath is None) or (fileName is None):
print("ERROR: check input")
if camera_names is None:
print("ERROR: no cameras specified")
# load DL1 images
dataFrames = {camera : pandas.read_hdf(inputPath / fileName, f"/{camera}") for camera in camera_names}
return dataFrames
[27]:
# First we check if a _plots_ folder exists already.
# If not, we create it.
Path("./plots").mkdir(parents=True, exist_ok=True)
[28]:
indir_CTAMARS = Path("/Volumes/DataCEA_PERESANO/Data/CTA/ASWG/Prod3b/Release_2019/CTAMARS_reference_data/TRAINING/DL1")
filename_CTAMARS = "DirLUT.root"
filepath_CTAMARS = Path(indir_CTAMARS, filename_CTAMARS)
CTAMARS_cameras = ["LSTCam", "NectarCam"]
CTAMARS_histograms = ["DirLookupTable", "DirLookupTable_degrees", "DirEventStatistics"]
CTAMARS = dict.fromkeys(CTAMARS_cameras)
with uproot.open(filepath_CTAMARS) as infile_CTAMARS:
for camera_index in range(len(CTAMARS_cameras)):
CTAMARS[CTAMARS_cameras[camera_index]] = dict.fromkeys(CTAMARS_histograms)
CTAMARS[CTAMARS_cameras[camera_index]][f"DirLookupTable"] = infile_CTAMARS[f"DirLookupTable_type{camera_index}"]
CTAMARS[CTAMARS_cameras[camera_index]][f"DirLookupTable_degrees"] = infile_CTAMARS[f"DirLookupTable_degrees_type{camera_index}"]
CTAMARS[CTAMARS_cameras[camera_index]][f"DirEventStatistics"] = infile_CTAMARS[f"DirEventStatistics_type{camera_index}"]
CTAMARS_X_edges = CTAMARS["LSTCam"]["DirLookupTable"].axes[0].edges()
CTAMARS_Y_edges = CTAMARS["LSTCam"]["DirLookupTable"].axes[1].edges()
[29]:
# EDIT ONLY THIS CELL
indir_protopipe = Path("/Users/michele/Applications/ctasoft/dirac/shared_folder/analyses/v0.4.0_dev1/data/TRAINING/for_energy_estimation")
filename_protopipe = "TRAINING_energy_tail_gamma_merged.h5"
[30]:
cameras = get_camera_names(inputPath = indir_protopipe,
fileName = filename_protopipe)
PROTOPIPE = load_reset_infile_protopipe(inputPath = indir_protopipe,
fileName = filename_protopipe,
camera_names=cameras)
missis here defined as the absolute value of the component transverse to the main shower axis of the distance between the true source position (0,0 in case of on-axis simulation) and the COG of the cleaned image,it is calculated for ALL images of the gamma1 sample and added to the tables for each camera,
then we select only images for which miss < 1.0 deg in each camera
[31]:
PROTOPIPE_selected = {}
for camera in cameras:
hillas_x = PROTOPIPE[camera]["hillas_x_reco"]
hillas_y = PROTOPIPE[camera]["hillas_y_reco"]
hillas_psi = PROTOPIPE[camera]["hillas_psi_reco"]
# Components of the distance between center of the camera (for on-axis simulations) and reconstructed position of the image
longitudinal, transverse = camera_to_shower_coordinates(x = 0.,
y = 0.,
cog_x = hillas_x,
cog_y = hillas_y,
psi = np.deg2rad(hillas_psi))
# Take the absolute value of the transverse component
# Add miss to the dataframe
PROTOPIPE[camera]["miss"] = np.abs(transverse)
# miss < 1 deg
mask = PROTOPIPE[camera]["miss"] < 1.0
# Make a smaller dataframe with just what we actually need and select for miss < 1 deg
PROTOPIPE_selected[camera] = PROTOPIPE[camera][['hillas_intensity_reco', 'hillas_width_reco', 'hillas_length_reco', 'miss']].copy()
PROTOPIPE_selected[camera] = PROTOPIPE_selected[camera][mask]
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/pandas/core/series.py:726: RuntimeWarning: invalid value encountered in cos
result = getattr(ufunc, method)(*inputs, **kwargs)
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/pandas/core/series.py:726: RuntimeWarning: invalid value encountered in sin
result = getattr(ufunc, method)(*inputs, **kwargs)
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/pandas/core/series.py:726: RuntimeWarning: invalid value encountered in cos
result = getattr(ufunc, method)(*inputs, **kwargs)
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/pandas/core/series.py:726: RuntimeWarning: invalid value encountered in sin
result = getattr(ufunc, method)(*inputs, **kwargs)
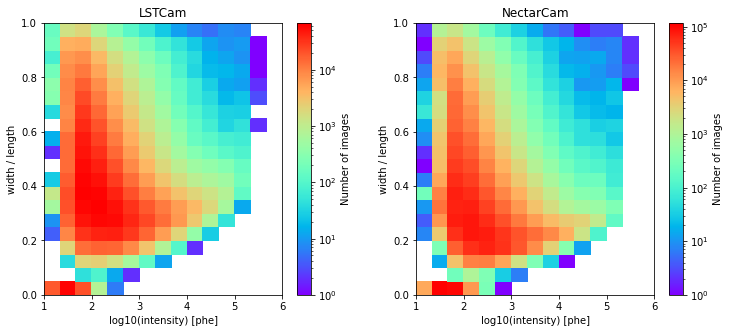
Counts¶
This is just the 2D grid that will host the LUT, showing how many events fall in each bin.
In CTAMARS an additional image quality cut for direction reconstruction selects for images that fall in a bin which contains >10 images
[32]:
fig = plt.figure(figsize=(12, 5))
plt.subplots_adjust(wspace = 0.25)
PROTOPIPE_COUNTS = {}
for i, camera in enumerate(cameras):
plt.subplot(1, 2, i+1)
intensity = PROTOPIPE_selected[camera]["hillas_intensity_reco"]
width = PROTOPIPE_selected[camera]["hillas_width_reco"]
length = PROTOPIPE_selected[camera]["hillas_length_reco"]
PROTOPIPE_COUNTS[camera], _, _, _ = plt.hist2d(x = np.log10(intensity),
y = width / length,
bins = [CTAMARS_X_edges, CTAMARS_Y_edges],
norm = LogNorm(),
cmap = "rainbow")
plt.title(camera)
cb = plt.colorbar()
cb.set_label("Number of images")
plt.xlabel("log10(intensity) [phe]")
plt.ylabel("width / length")
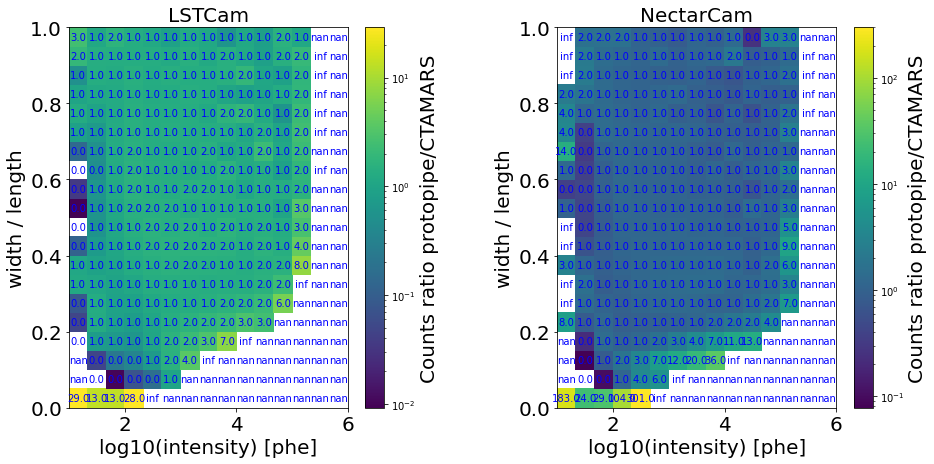
Counts ratio between protopipe and CTAMARS¶
[33]:
fig = plt.figure(figsize=(15, 7))
plt.subplots_adjust(wspace = 0.4)
font_size = 20
for i, camera in enumerate(cameras):
RATIO = PROTOPIPE_COUNTS[camera]/CTAMARS[camera]["DirEventStatistics"].values()
plt.subplot(1, 2, i+1)
plt.pcolormesh(CTAMARS_X_edges,
CTAMARS_Y_edges,
np.transpose(PROTOPIPE_COUNTS[camera]/CTAMARS[camera]["DirEventStatistics"].values()),
norm = LogNorm()
)
# add value labels for better visualization
for i, x in enumerate(CTAMARS[camera]["DirLookupTable_degrees"].axes[0].centers()):
for j, y in enumerate(CTAMARS[camera]["DirLookupTable_degrees"].axes[1].centers()):
plt.text(x,
y,
np.round(RATIO[i][j]),
ha='center',va='center',
size=10,color='b')
plt.title(camera, fontsize=font_size)
ax = plt.gca()
cb = plt.colorbar()
cb.set_label("Counts ratio protopipe/CTAMARS", fontsize=font_size)
ax.tick_params(axis='both', which='major', labelsize=font_size)
ax.tick_params(axis='both', which='minor', labelsize=font_size)
plt.xlabel("log10(intensity) [phe]", fontsize=font_size)
plt.ylabel("width / length", fontsize=font_size)
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/ipykernel_launcher.py:7: RuntimeWarning: divide by zero encountered in true_divide
import sys
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/ipykernel_launcher.py:7: RuntimeWarning: invalid value encountered in true_divide
import sys
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/ipykernel_launcher.py:13: RuntimeWarning: divide by zero encountered in true_divide
del sys.path[0]
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/ipykernel_launcher.py:13: RuntimeWarning: invalid value encountered in true_divide
del sys.path[0]
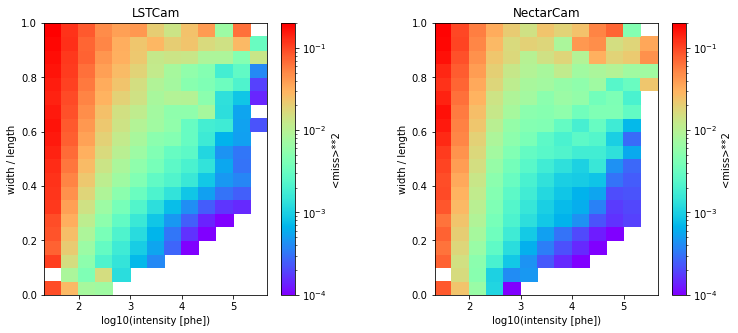
Direction LUT¶
[34]:
# Build the LUT by using,
# - ``np.log10(intensity)`` as ``x`` axis,
# - ``width/length`` as ``y``axis,
# For each 2D bin we calculate the ``mean of miss`` for the images which fall into that bin.
mean_miss = {}
for camera in cameras:
intensity = PROTOPIPE_selected[camera]["hillas_intensity_reco"]
width = PROTOPIPE_selected[camera]["hillas_width_reco"]
length = PROTOPIPE_selected[camera]["hillas_length_reco"]
miss = PROTOPIPE_selected[camera]["miss"]
mean_miss[camera], _, _, _ = binned_statistic_2d(x = np.log10(intensity),
y = width/length,
values = miss,
statistic='mean',
bins=[CTAMARS_X_edges, CTAMARS_Y_edges]
)
[35]:
# After obtaining such a 2D binned statistic we square the value of each bin.
# That is the final LUT
LUT = {}
for camera in cameras:
LUT[camera] = np.square(mean_miss[camera])
[36]:
fig = plt.figure(figsize=(12, 5))
plt.subplots_adjust(wspace = 0.4)
for i, camera in enumerate(cameras):
plt.subplot(1, 2, i+1)
plt.pcolormesh(CTAMARS_X_edges,
CTAMARS_Y_edges,
np.transpose( LUT[camera] ),
norm = LogNorm(vmin = 1.e-4, vmax = 2.e-1),
cmap = "rainbow"
)
plt.title(camera)
cb = plt.colorbar()
cb.set_label("<miss>**2")
plt.xlabel("log10(intensity [phe])")
plt.ylabel("width / length")
plt.xlim(CTAMARS_X_edges[1], CTAMARS_X_edges[-2])
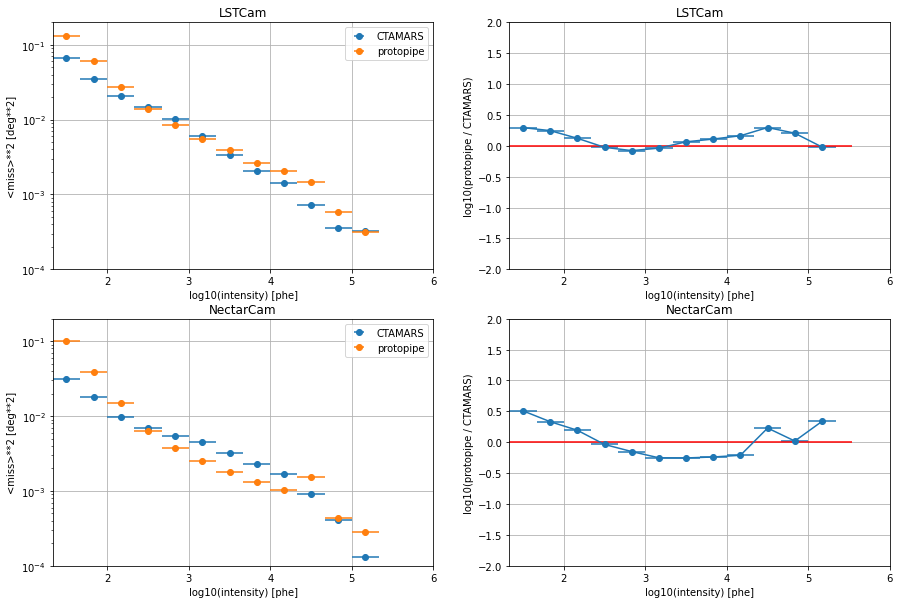
Direction LUT comparisons between protopipe and CTAMARS¶
Profile along Y-axis (width/length)¶
Here we select as an example the bin #9, containing images with 0.45 < width / length < 0.55
[37]:
plt.figure(figsize=(15,10))
plt.subplots_adjust(hspace=0.2, wspace=0.2)
for i, camera in enumerate(cameras):
plt.subplot(2, 2, i*2+1)
H = np.transpose(CTAMARS[camera]["DirLookupTable_degrees"].values())
plt.errorbar(x = CTAMARS[camera]["DirLookupTable_degrees"].axes[0].centers(),
y = H[9],
xerr = np.diff(CTAMARS_X_edges)/2,
yerr = None,
fmt="o",
label="CTAMARS")
plt.errorbar(x = CTAMARS[camera]["DirLookupTable_degrees"].axes[0].centers(),
y = np.transpose(LUT[camera])[9],
xerr = np.diff(CTAMARS_X_edges)/2,
yerr = None,
fmt="o",
label="protopipe")
plt.xlabel("log10(intensity) [phe]")
plt.ylabel("<miss>**2 [deg**2]")
plt.grid()
plt.yscale("log")
plt.title(camera)
plt.legend()
plt.xlim(CTAMARS_X_edges[1], CTAMARS_X_edges[-1])
plt.ylim(1.e-4, 2.e-1)
plt.subplot(2, 2, i*2+2)
ratio = np.transpose(LUT[camera])[9] / H[9]
plt.errorbar(x = CTAMARS[camera]["DirLookupTable_degrees"].axes[0].centers()[1:-1],
y = np.log10(ratio[1:-1]),
xerr = np.diff(CTAMARS_X_edges[1:-1])/2,
yerr = None,
ls = "-",
fmt="o",)
plt.hlines(0., plt.gca().get_xlim()[0], plt.gca().get_xlim()[1], colors="red", linestyles='solid')
plt.xlabel("log10(intensity) [phe]")
plt.ylabel("log10(protopipe / CTAMARS)")
plt.grid()
plt.title(camera)
plt.xlim(CTAMARS_X_edges[1], CTAMARS_X_edges[-1])
plt.ylim(-2,2.)
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/ipykernel_launcher.py:35: RuntimeWarning: divide by zero encountered in true_divide
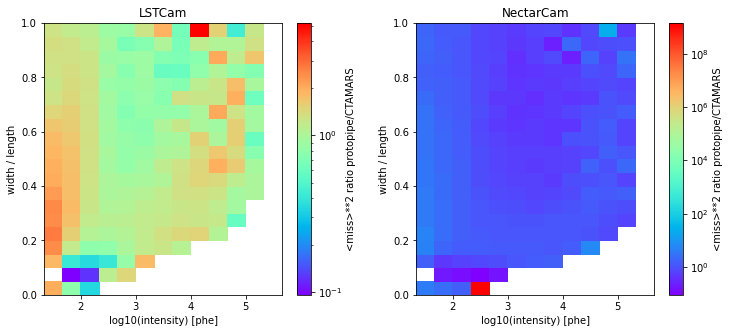
Ratio between the LUTs¶
[38]:
# we use the same bin edges of CTAMARS reference data
fig = plt.figure(figsize=(12, 5))
plt.subplots_adjust(wspace = 0.25)
for i, camera in enumerate(cameras):
plt.subplot(1, 2, i+1)
plt.pcolormesh(CTAMARS_X_edges,
CTAMARS_Y_edges,
np.transpose( LUT[camera] / CTAMARS[camera]["DirLookupTable_degrees"].values()),
norm=LogNorm(),
cmap = "rainbow"
)
plt.title(camera)
cb = plt.colorbar()
cb.set_label("<miss>**2 ratio protopipe/CTAMARS")
plt.xlabel("log10(intensity) [phe]")
plt.ylabel("width / length")
plt.xlim(CTAMARS_X_edges[1], CTAMARS_X_edges[-2])
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/ipykernel_launcher.py:12: RuntimeWarning: divide by zero encountered in true_divide
if sys.path[0] == '':
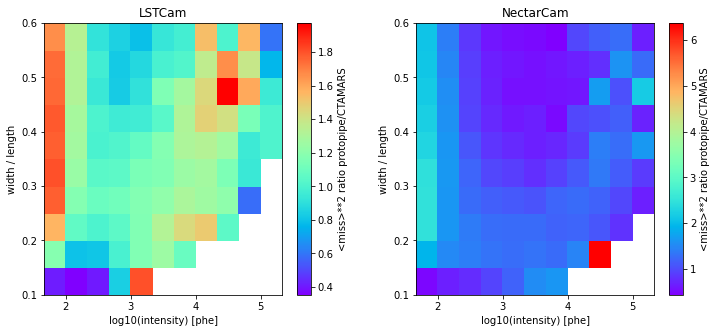
Same, but zomming in the regime of current image quality cuts
0.1 < width/length < 0.6
intensity > 50 phe
[39]:
fig = plt.figure(figsize=(12, 5))
plt.subplots_adjust(wspace = 0.25)
for i, camera in enumerate(cameras):
plt.subplot(1, 2, i+1)
plt.pcolormesh(CTAMARS_X_edges[2:-2],
CTAMARS_Y_edges[2:13],
np.transpose( LUT[camera] / CTAMARS[camera]["DirLookupTable_degrees"].values())[2:12,2:-2],
cmap = "rainbow"
)
plt.title(camera)
cb = plt.colorbar()
cb.set_label("<miss>**2 ratio protopipe/CTAMARS")
plt.xlabel("log10(intensity) [phe]")
plt.ylabel("width / length")
/Users/michele/Applications/miniconda3/envs/protopipe/lib/python3.7/site-packages/ipykernel_launcher.py:10: RuntimeWarning: divide by zero encountered in true_divide
# Remove the CWD from sys.path while we load stuff.
[ ]: